AGV的对接应用(海康)
一、功能说明
- 目前AI-WMS PLUS系统可以支持通过调AGV设备接口实现AGV搬运,品牌为:海康
- 设置好对应的AGV站点,可实现储位上下架和货品搬运功能
- 接口版本:厂内物流机器人控制系统 RCS-2000 V3.2
二、流程说明
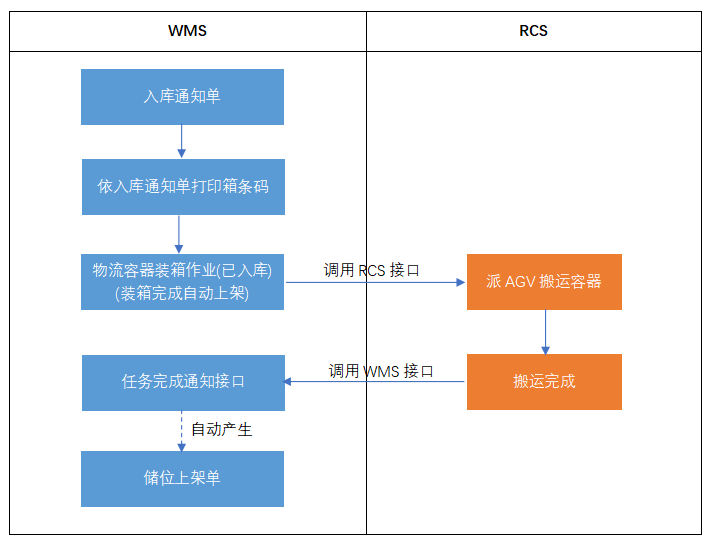
1.入库上架流程说明
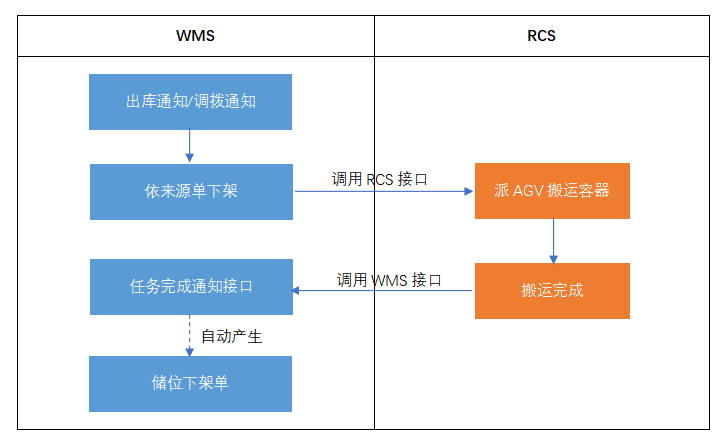
2.下架流程说明
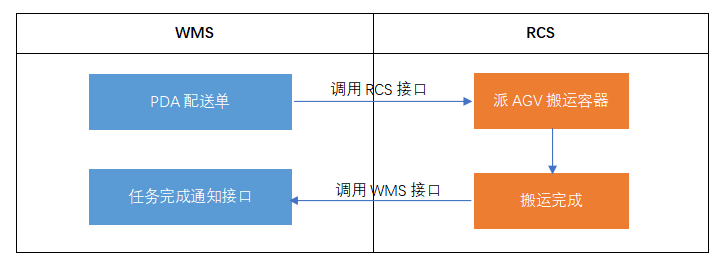
3.点对点配送流程说明
三、功能使用
(一)基础资料设定
- 设置自动化仓库接口配置
接口名称:自定义
接口供应商:必填,选择对应的供应商
接口地址:填写硬件对应接口的地址
拣货点:填写对应的AGV站点
默认制单人:填写默认制单的员工
任务模板:模板代号#起点;终点
例子:1#00;00

- 仓库代号设定
【启用储位管理】,勾选;此功能要求仓库启用储位管理
【上下架模式】,选择“自动化接口模式”
【自动化接口】,选择自动化接口配置中设置的自动化接口代号

- 设置【AGV站点设定】

【AGV站点代号】自定义
【AGV站点名称】自定义
【所属仓库】选择该AGV站点隶属于哪个仓库,便于其他功能中的筛选
【部门】填写所属部门
【任务类型】分为两点和三点,起点->终点为两点,起点->拣货点->终点为三点,可以根据需求自行设定

- 安装LK_API
不同客户会有专属LK_API服务,AGV上下架以及搬运功能需要通过LK_API服务调硬件设备接口实现,故客户在使用前要安装好
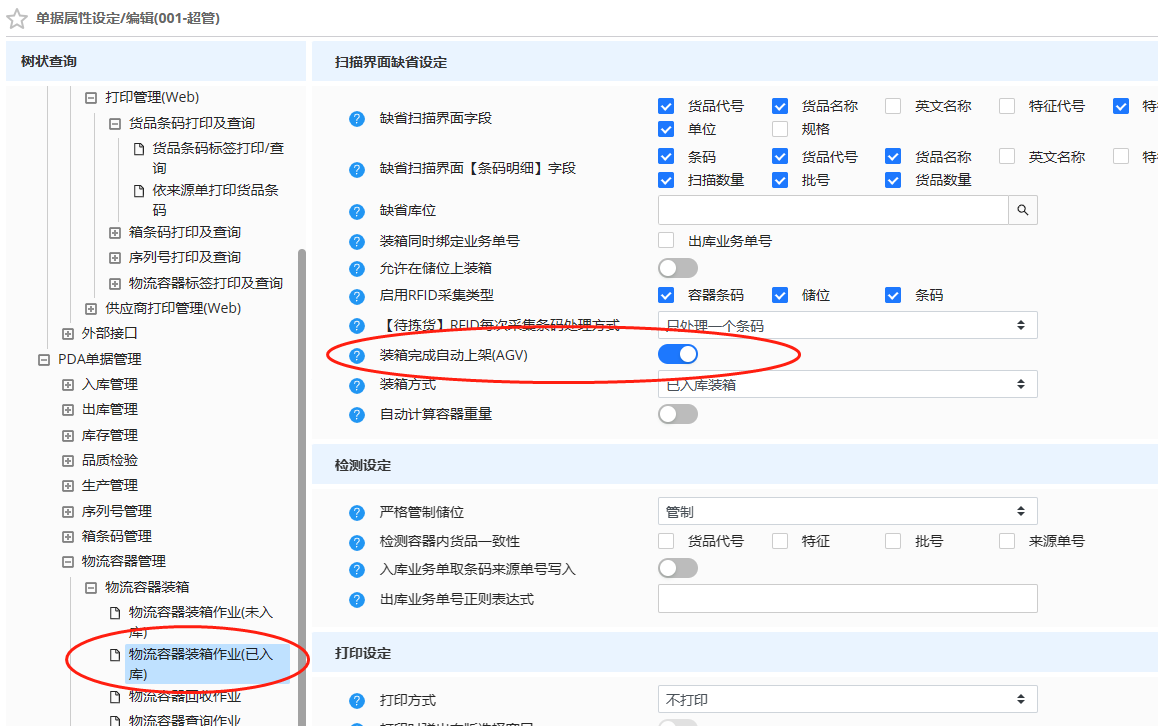
- 设置属性
开启“装箱完成自动上架(AGV)”,开启该属性后,保存物流容器装箱作业(已入库)后,会自动产生上架任务
(二)上架流程
流程1:入库-上架
1.前置单据须有入库通知单or入库单

2.依来源单打印箱条码
- 来源单据选择“入库单”,然后选择需要打印的单据,点击打印,打印对应的箱条码

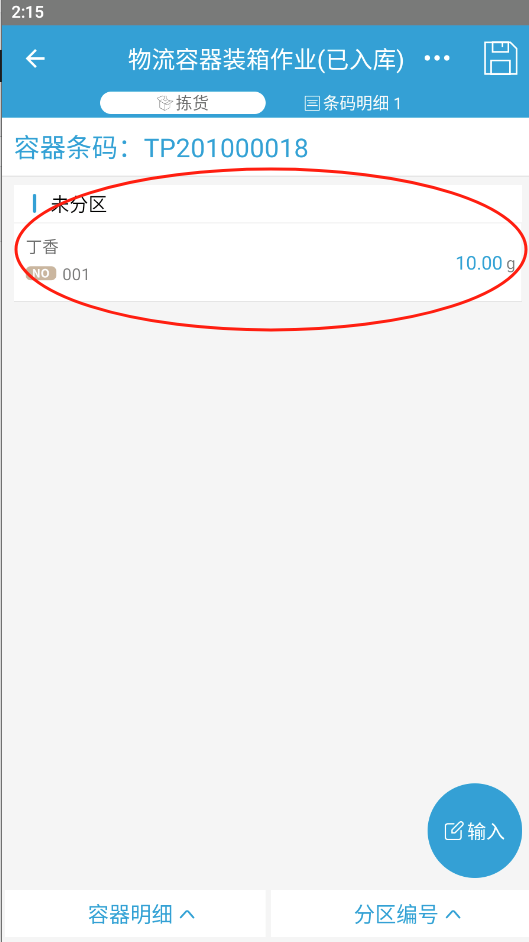
3.打开PDA【物流容器装箱作业(已入库)】

- 扫描容器条码
- 选择库位
- 点击【下一步】

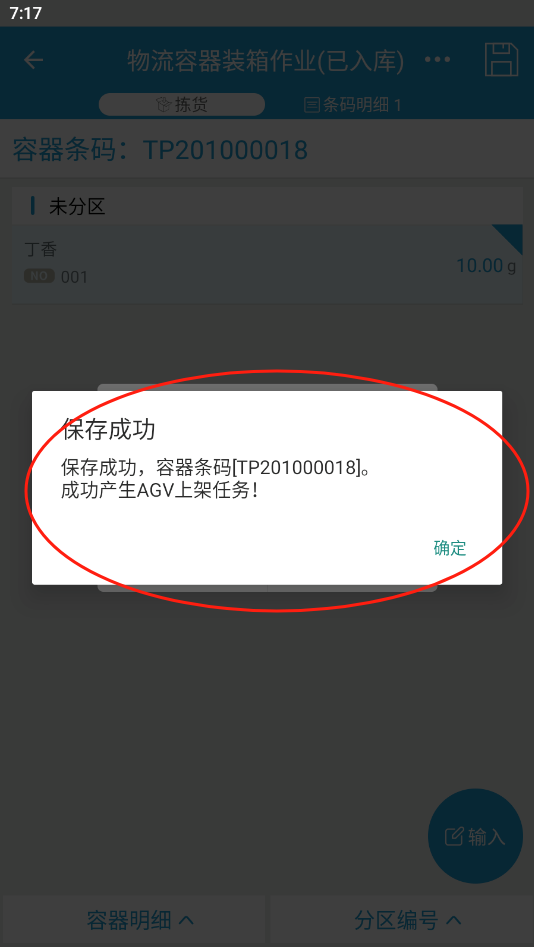
4.扫描箱条码

5.在弹出的窗口中选择AGV站点,然后点击【确定】

- 当提示“自动上加(AGV)成功!”,则会发送上架任务给AGV;如果提示失败,则容器已装箱,但发送任务给AGV失败,若要再次发送任务,则可以进入【AGV上架作业】重新上架。
- 产生的上架任务可以在【推送WCS/RCS明细表】中查看详情

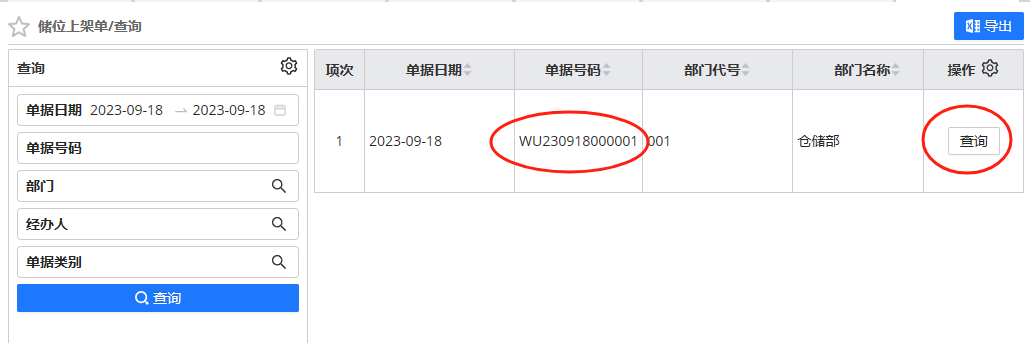
5.AGV上架完成后,调用任务完成接口,则WMS产生【储位上架单】
任务完成接口可在

【储位上架单】位置:库存管理–储位上架单

可以点击想要查询的单据,来查看详情:

流程2:PDA做【AGV上架作业】-上架
1.点击PDA【AGV上架作业】

2.设置好上架仓库和取货点,扫描需要上架的容器条码
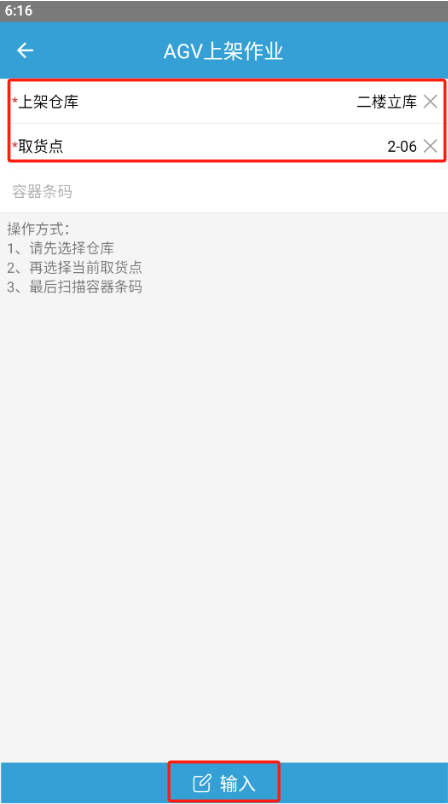

3.系统会提示处理成功,WMS会推送上架任务给AGV,AGV上架完成后即会新增“储位上架单”。

(三)下架流程
流程1:有来源单(库存调拨单/出库通知单)
1.前置单据有来源单(此处以调拨通知单为例)

2.打开WEB【依来源单下架】,选择拨出库作为仓库
筛选单据,勾选相应单据,点击批量下架
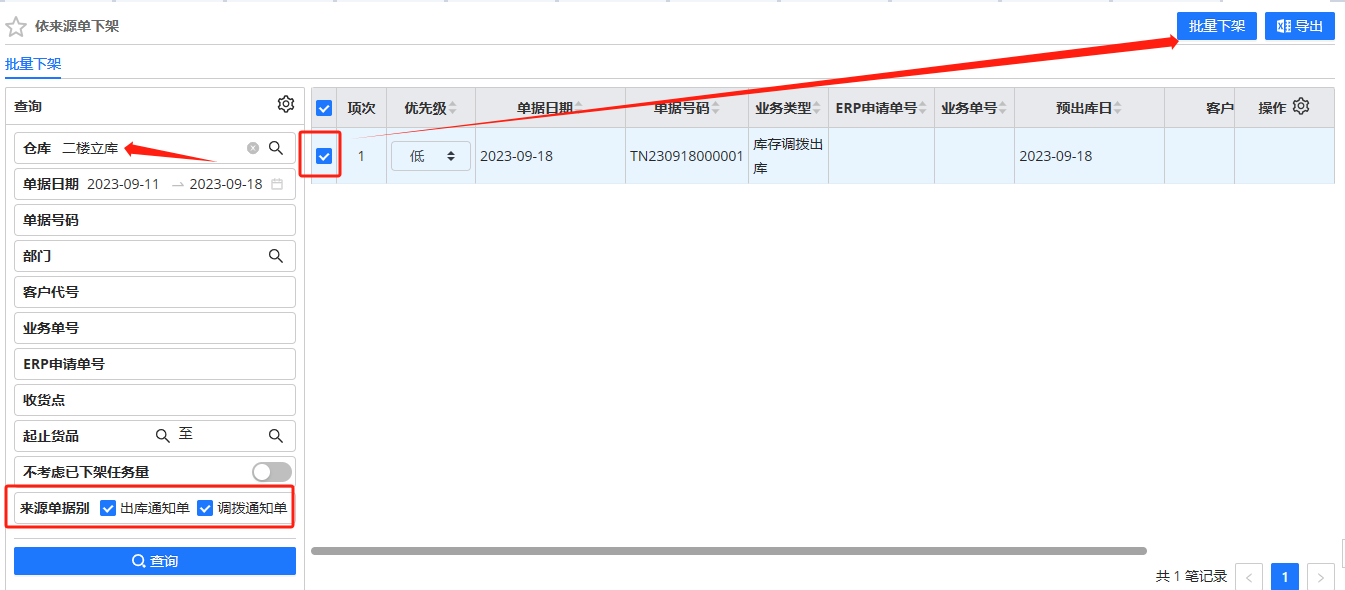
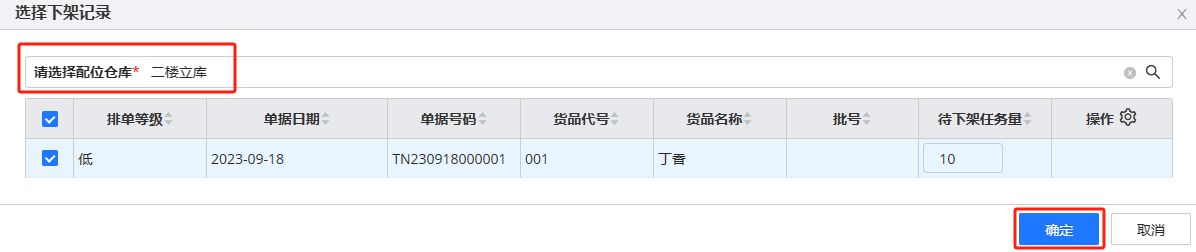
选择需要配位的仓库,点击确定,即可产生下架任务推送给AGV
产生的下架任务可以在【推送WCS/RCS明细表】中查看详情

3.AGV搬运到拣货点,任务完成后自动产生【储位下架单】
任务完成接口可在

【储位下架单】位置:库存管理–储位下架单

可以点击想要查询的单据,来查看详情:


流程2:PDA直接做【容器下架】
1.打开PDA【容器下架】
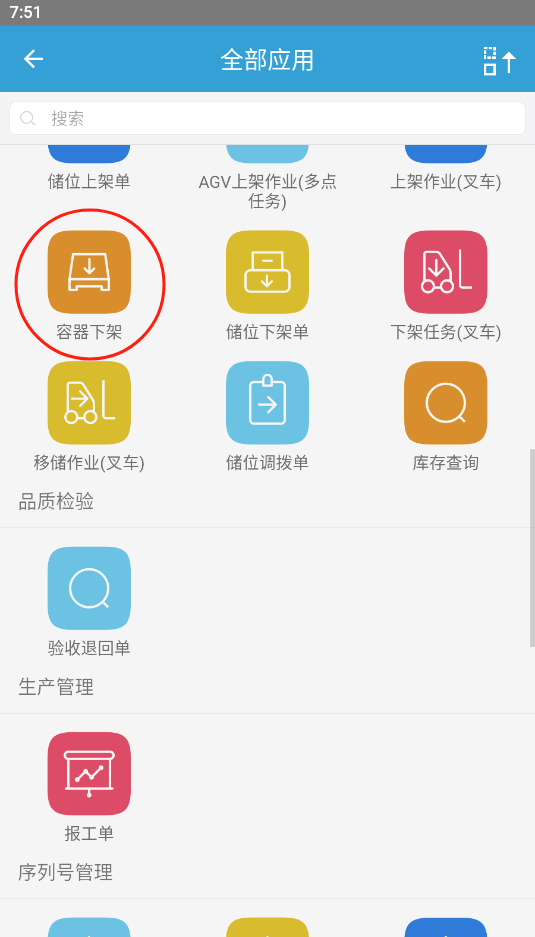
2.点击需要进行的操作:空容器批量下架或指定容器下架,此处我们点击指定容器下架.

3.进入页面后,选择需要下架容器的仓库,然后确定

3.选择需要下架的容器,点击下架,即可产生下架任务推送给AGV
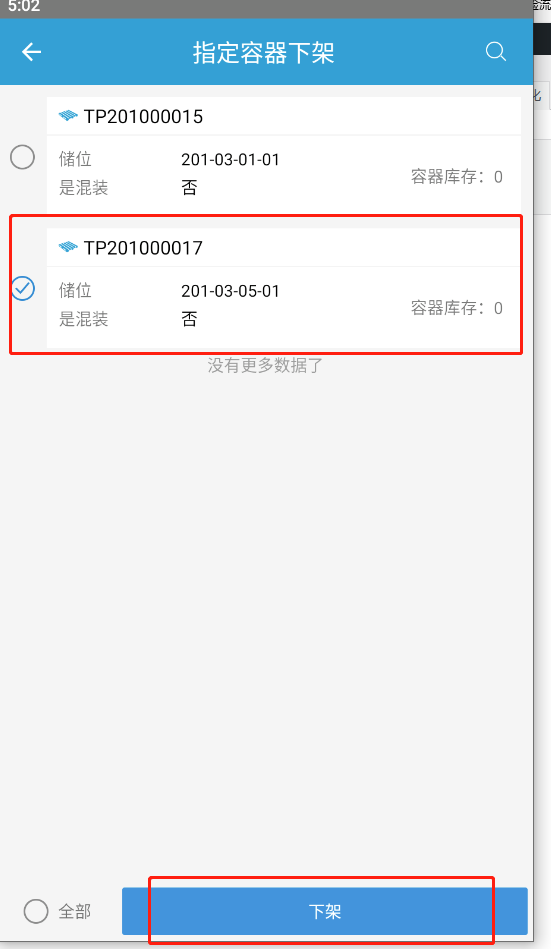
3.AGV搬运到拣货点,任务完成后自动产生【储位下架单】
(四)点对点配送流程
1.打开PDA【配送单】

2.选择无来源配送,填写好需要配送的起点与终点,最后扫描容器条码,提交
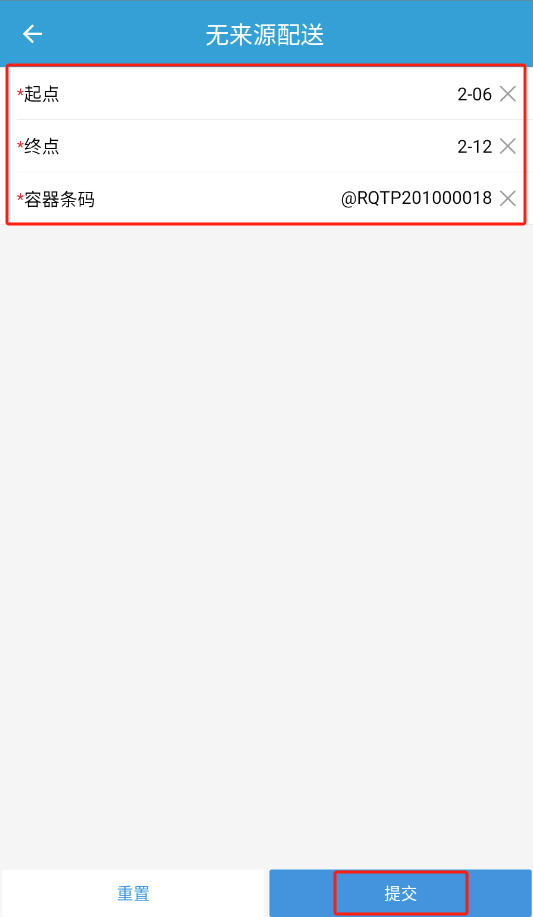
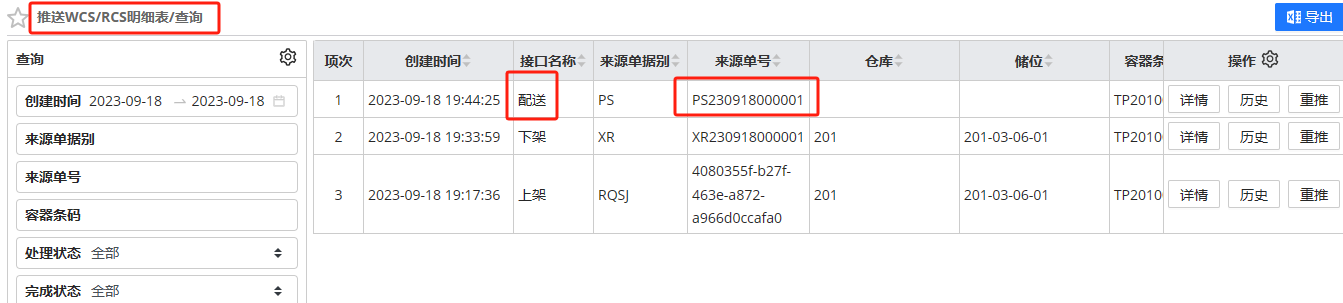
3.产生配送任务

- 配送任务也可以在【推送WCS/RCS明细表】中查询
- 任务完成接口可在WCS/RCS调用明细表中查询:

注:配送单只能配送不在储位上的容器,如果容器在储位上,请先下架。
配送单结束后不会影响到任何单据以及状态。