容器与站点的绑定/解绑
一、概述
目前AGV在搬运货物到目的地时,如果目的地未卸货,又接受了新任务,就会造成AGV无法卸货,影响AGV的工作效率,为了避免此问题,AI-WMS PLUS系统增加了AGV站点与容器绑定的处理,以下为详细使用说明及影响!
二、如何运用此功能
1、基础资料的设置
-
【自动化仓库接口配置】
由于是AGV站点与容器的绑定处理,因此,必须要针对AGV的自动化接口进行设置,目前支持的接口供应商有:海康(RCS)
该页面具体如何设置,可参考【自动化仓库接口设置】。

-
【仓库代号设定】
在【仓库代号设定】中,设置【上下架模式】为【自动化接口模式】,且在【自动化接口】选择“海康”RCS的接口代号;

-
【AGV站点设定】
在【AGV站点设定】中添加AGV站点,如果【启用容器绑定】开启,则后面该站点便会按绑定处理来影响。
注:【启用容器绑定】开启时,海康RCS任务模版需要增加START任务节点,否则不能开启。

2、业务流程相关处理
如果【AGV站点设定】中有开启了【启用容器绑定】功能,那么关于该AGV站点的上架、下架、配送等AGV任务,便会有可能被锁定及解锁。以下根据AGV站点的任务为【起点】、【终点】的绑定处理作说明!
-
-
AGV任务的【起点】为AGV站点
-
此种情况是将AGV站点的容器搬运到其他位置。(例如AGV或CTU的上架任务、配送任务等)
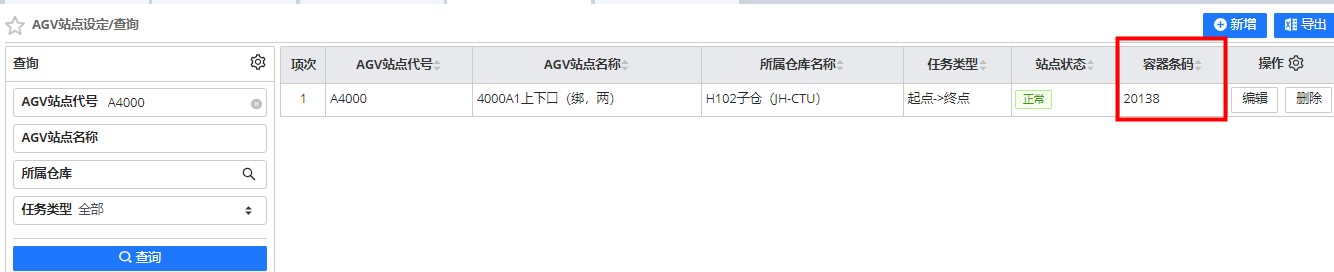
(1)、首先,要在PDA的【容器与站点绑定/解绑】中(需要在WMSWEB的【类别权限设定】中给予菜单显示的权限),选中【绑定】,扫描AGV站点及容器条码,点击【提交】,那么此AGV站点便绑定了此容器条码。(在容器条码表头回写了AGV站点代号)

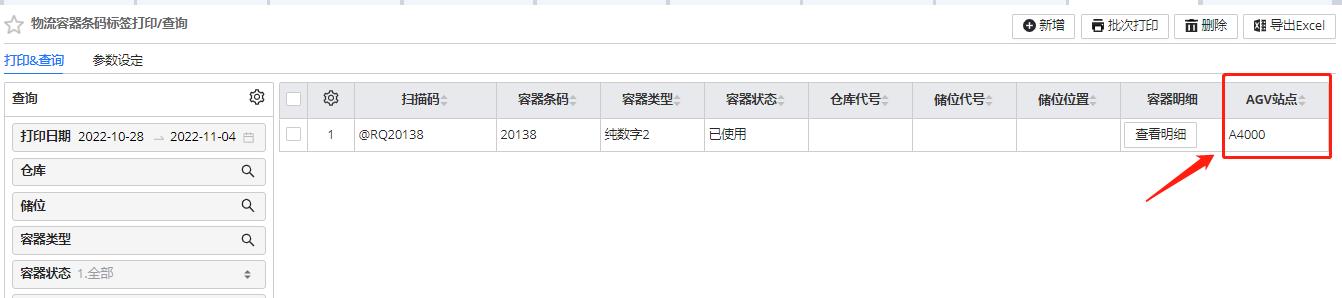
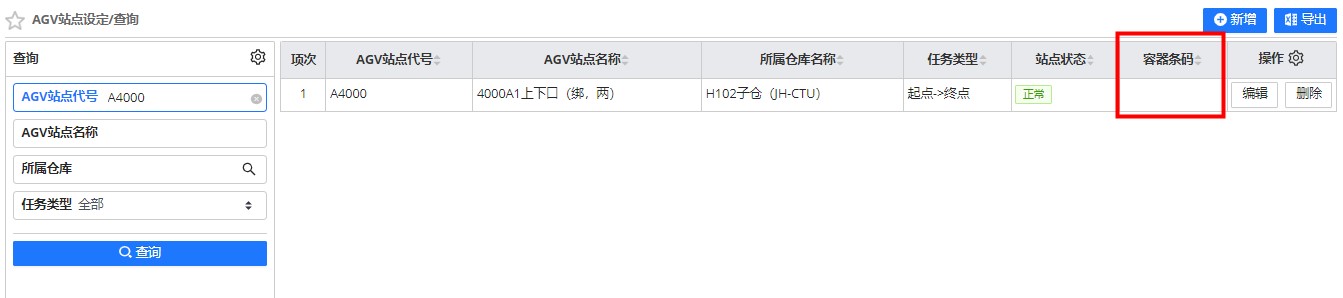
可在【物流容器条码标签打印】或【AGV站点设定】查看到相对应的绑定信息:

(2)、那么,当产生AGV任务,【起点】为该站点时,在产生任务时,会将【AGV站点设定】的【锁定状态】变更为【锁定】;


(3)、当AGV开始执行任务,在该站点取到容器时,海康RCS必须调WMS接口【任务完成通知】,并且参数“method”必须为“START”;
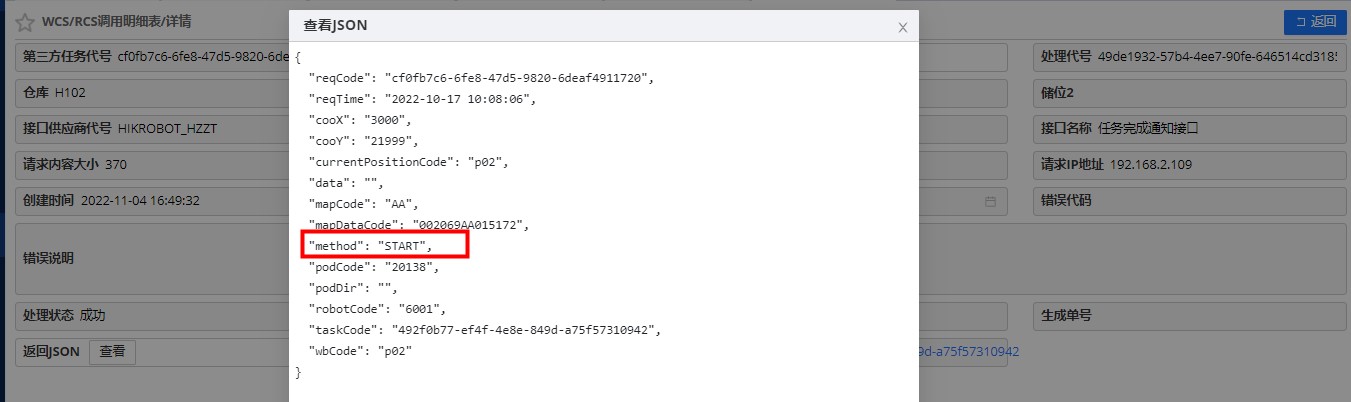
当调用“START”节点的接口成功时,便会有以下影响:
A、容器与AGV站点自动解绑;
B、AGV站点在【AGV站点设定】中的【锁定状态】变更为【正常】。

(4)、最后该AGV站点又可以被使用。
-
AGV任务的【终点】为AGV站点
此种情况是AGV将容器搬运至AGV站点。(例如AGV或CTU的下架任务、配送任务等)
(1)、当AGV任务的【终点】为AGV站点时,不需要进行容器与站点的绑定,即不需要操作PDA的【容器与站点绑定/解绑】;
(2)、当产生AGV执行任务,且【终点】为AGV站点时,会将【AGV站点设定】的【锁定状态】变更为【锁定】,


(3)、当AGV将容器放到目的地AGV站点时,那么RCS是会调用WMS的【任务完成通知】接口,且接口参数“method”应该为“PICKING1、PICKING2、END”,此时会有以下影响:
A、将AGV站点代号更新到【容器条码表头】的【AGV站点】中;
B、同时将【AGV站点设定】的【锁定状态】更新为【正常。

-
-
AGV任务的【起点】、【终点】都为AGV站点
-
此种情况是AGV将容器由一个AGV站点搬运到另一个AGV站点。(例如配送任务)
可参考以上说明。
3、解绑容器与AGV站点
当容器与AGV站点要解绑时,可操作PDA【容器与站点绑定/解绑】的【解绑】功能。
1、登录PDA后,找到【容器与站点绑定/解绑】菜单,打开此菜单,如下图:

2、在【容器与站点绑定/解绑】画面,点击【解绑】,然后扫描【AGV站点】或【容器条码】任意一个值便可:

3、扫描后便自动进行检测,检测通过后会提示“确定提交?”,点击【确定】便提交,点击【取消】便取消提交!
