PDA【AGV上架作业(多点任务)】
一、说明
- 主要提供【呼叫容器】【装货回库】两个功能
- 呼叫容器,当库内存在空容器,则可以通过此单一次性呼叫多个空容器到指定地点;空容器不足时,由用户决定是否呼叫已使用容器
- 装货回库,当呼叫的容器已到指定地点,即可先扫描容器码,再扫描货品条码,装箱后将容器再送回仓库储位
- 作业任务模式支持“起点-拣货点-终点”模式
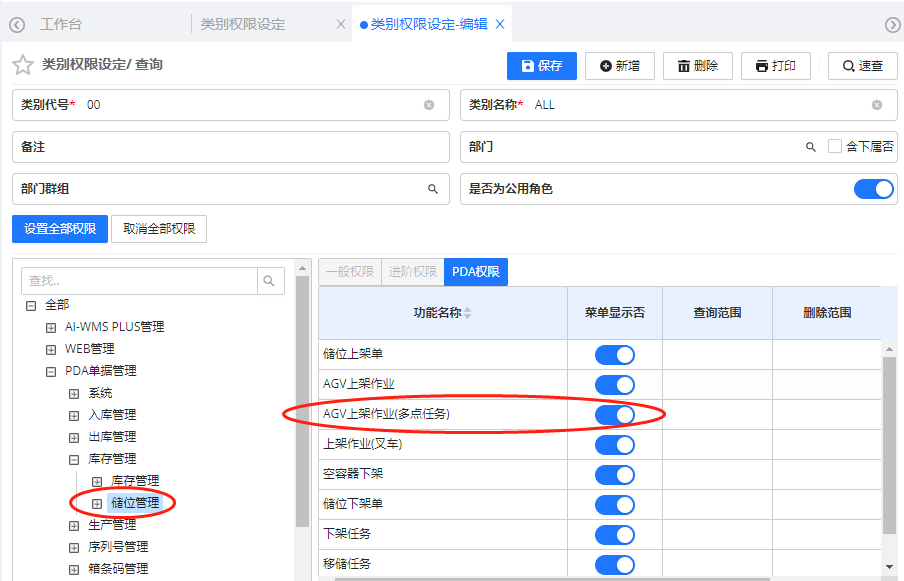
二、单据权限设定
- 针对【AGV上架作业(多点任务)】单据,勾选“菜单显示否”按钮,并保存权限
三、操作说明
(一)呼叫空容器->装车回库
呼叫空容器到指定地点,空容器装货后,再送回到容器原有储位上
- PDA画面,点击单据

- 进入界面,点击【呼叫空容器】按钮
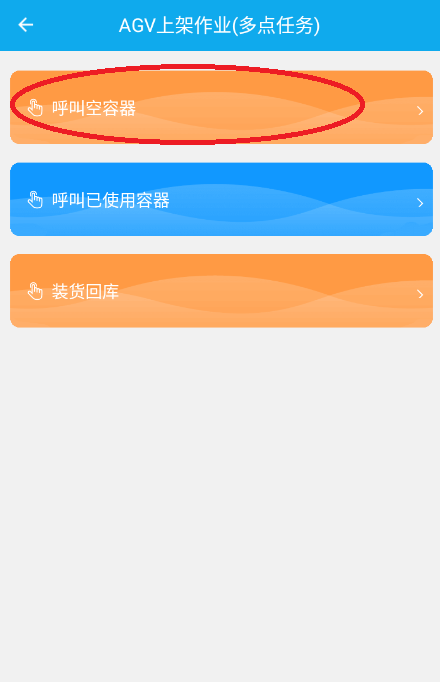
- 进入界面
【拣货点】,即选择空容器下架后需要AGV送到的点
【仓库】,会根据拣货点自动带出
【容器个数】,即需要呼叫多少个空容器从储位下架到拣货点

- 点击【提交】


- 查询生成的上架任务
菜单位置:【外部接口】-【自动化仓库管理】-【推送WCS/RCS明细表】
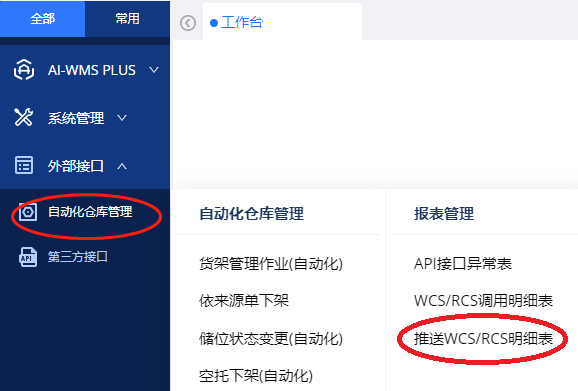
- 点击单据查询上架任务
通过任务可以看出呼叫的空容器码为ZZX39

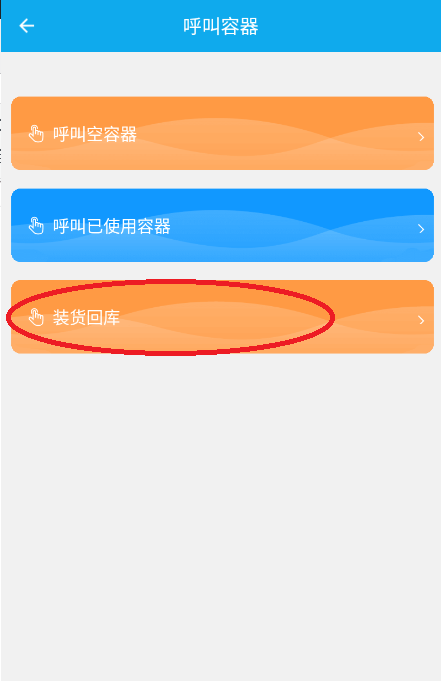
- AGV执行完任务会将ZZX39容器从储位送到拣货点Q01002
- 点击【装车回库】按钮
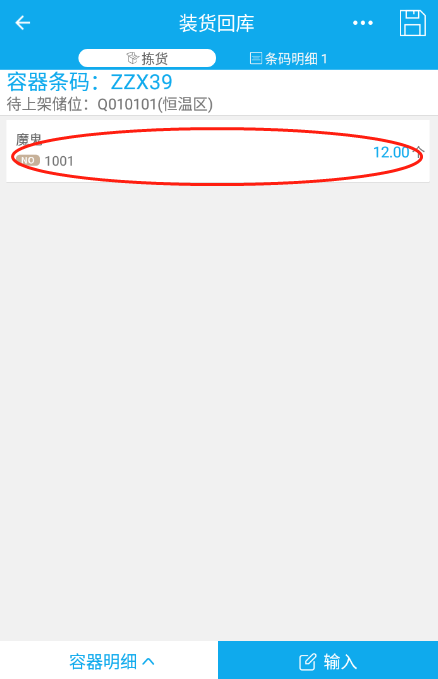
- 进入界面,扫描容器码,即ZZX39

- 进入待拣货界面

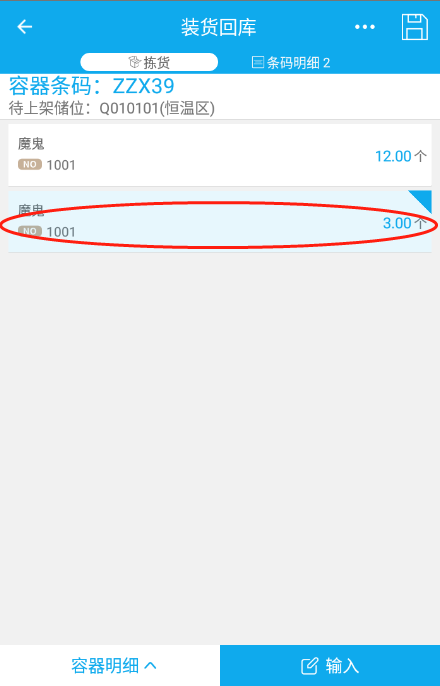
- 扫描要装入容器的货品条码(支持条码、箱码、序列号)


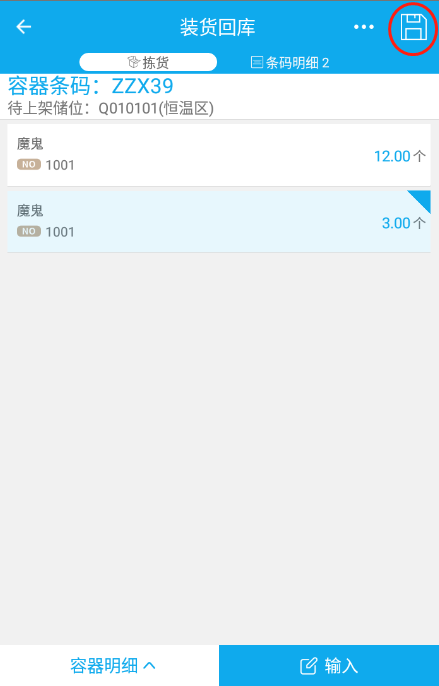
- 点击【保存】
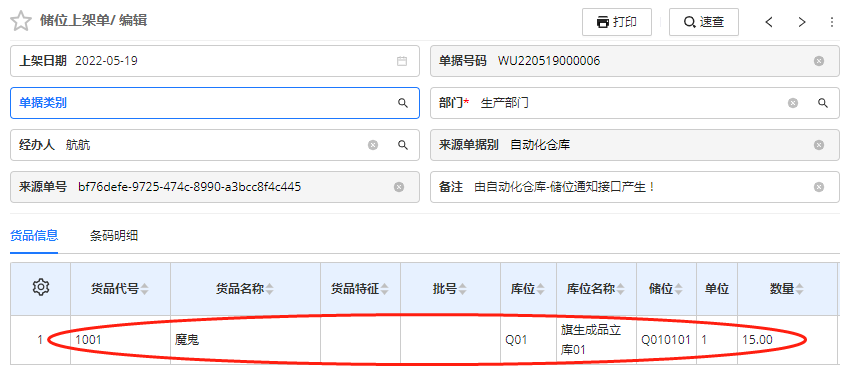
- 查询生成“上架(继续任务)”任务

- AGV执行完任务后,生成储位上架单,将装箱后的容器送回到原有储位


(二)呼叫已使用容器->装车回库
当空容器不够时,可通过【呼叫已使用容器】按钮呼叫已装箱的容器,用来继续装货品
- PDA画面,点击单据
- 进入界面,点击【呼叫已使用容器】按钮
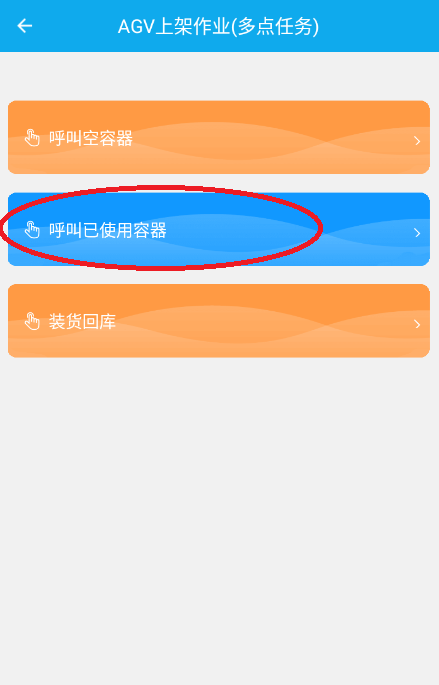
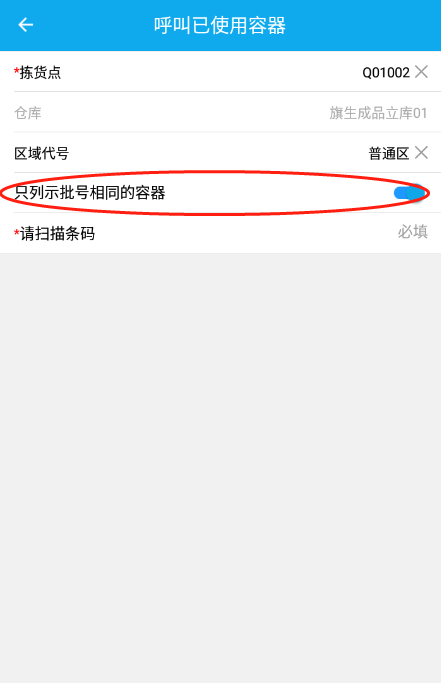
- 进入界面
【拣货点】,即选择容器下架后需要AGV送到的点
【仓库】,会根据拣货点自动带出
【请扫描条码】,即扫描需要装入容器的条码,根据扫描的条码对应的货品+特征+批号去匹配装有相同货品的容器
只支持扫描货品条码、箱条码及序列号

扫描条码后自动跳转,查询出符合要求的容器

- 勾选要呼叫的容器,并点击提交,支持多选


- 查询生成的上架任务
菜单位置:【外部接口】-【自动化仓库管理】-【WMS单据推送历史表(自动化)】
- 点击单据查询上架任务
通过任务可以看出呼叫的空容器码为ZZX39
 AGV执行完任务会将ZZX39容器从储位送到拣货点Q01002
AGV执行完任务会将ZZX39容器从储位送到拣货点Q01002- 点击【装车回库】按钮
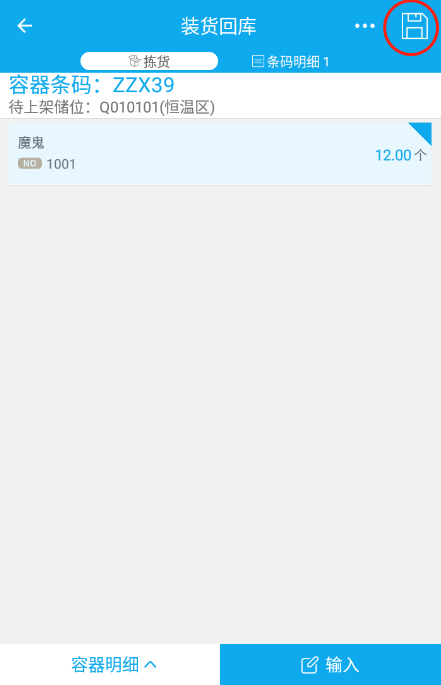
- 进入界面,扫描容器码,即ZZX39
- 进入待拣货界面,可查看到容器内已装箱的货品内容
- 扫描要装入容器的货品条码(支持条码、箱码、序列号)

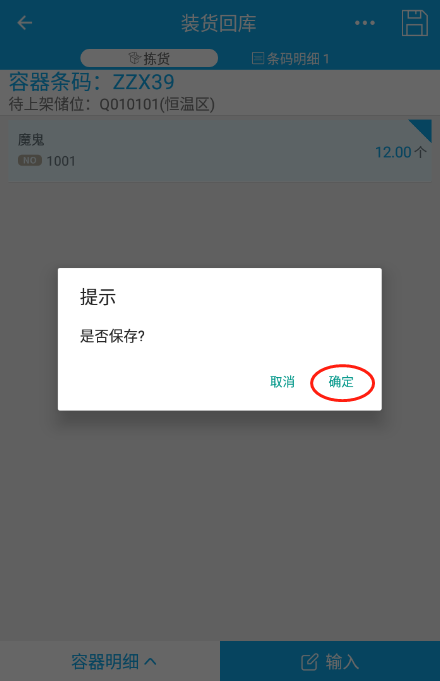
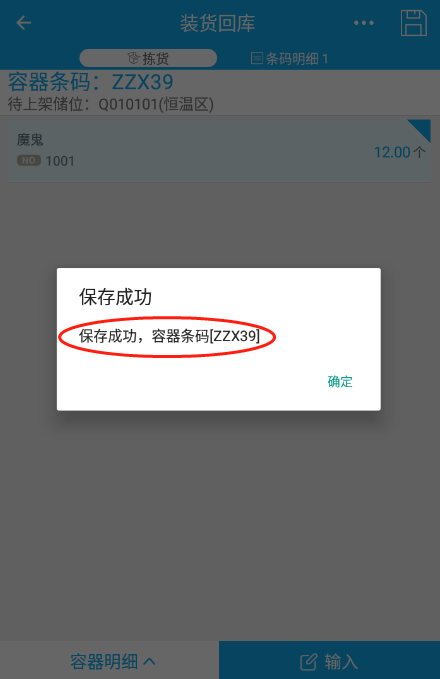
- 点击【保存】
- 查询生成“上架(继续任务)”任务
 AGV执行完任务后,生成储位上架单,将装箱后的容器送回到原有储位
AGV执行完任务后,生成储位上架单,将装箱后的容器送回到原有储位

四、单据影响
储位状态影响
保存单据成功产生AGV任务时,会同时对任务的储位代号进行锁定,即【储位代号设定】的【储位状态】为【锁定】的状态。
五、属性说明

1、默认拣货点:在此属性选择了AGV站点,那么在PDA【AGV上架作业(多点任务)】的“呼叫空容器”和“呼叫已使用容器”画面的拣货点会默认带入属性值。
2、拣货点的待处理任务数不允许超过【】个:默认值为“2”,即当前拣货点的任务数不能超过2个;
呼叫空容器和呼叫已使用容器时,均会选择拣货点,即需要AGV将容器送达的站点,
那么此站点的任务数的限制即通过此属性设置。
数量的管控为即将生成的任务数+已存在且未完成的任务数,
举例:呼叫2个空容器即产生2笔任务,已存在正在执行且未完成的任务数1个,
如果属性值为3,则呼叫2个空容器可以正常产生任务;如果属性值为2,那么呼叫2个
空容器时就会给出提示已经超出允许的任务数量。
3、必填字段:默认不勾选;勾选后,PDA画面【AGV上架作业(多点任务)】对应的呼叫空容器及呼叫已使用容器画面的“存放区域”栏位为必填,反之则不管控。
4、排序设定:用于管控“呼叫已使用容器”画面过滤到的可以选择的容器的排序。
六、其他说明
(一)存放区域
当仓库有划分区域时,可以指定呼叫某区域的空容器或已使用容器
- 仓库区域设定

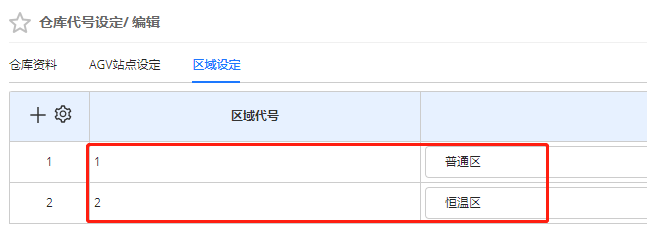
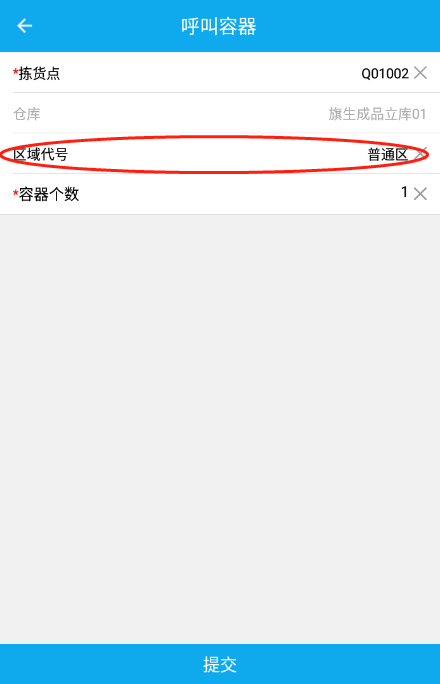
- 呼叫“普通区”的空容器
呼叫容器界面,【区域代号】选择“普通区”,提交后只会从普通区呼叫空容器到指定地点
呼叫已使用容器同理

(二)呼叫已使用容器-可根据条码匹配装有相同批号货品的容器
勾选【只列示批号相同的容器】按钮,扫描条码后,会根据条码的批次去匹配装有相同批号货品的容器
(三)该单据可支持RFID的使用
即如果PDA设备是自带有RFID功能的,且是AI-WMS PLUS可支持的型号,那么便可开启RFID功能自动感应RFID容器及储位标签进行使用。
具体说明可参考如下:
1、可支持的RFID硬件,参考【AI-WMS PLUS 搭配使用的硬件列表】的【四、RFID手持终端】。
2、关于【RFID电子标签的应用】。